概要
補正アルゴリズムの提案①で行った、目印をX線管に貼り付けてブレを検出する方法では、台座上の変動と、焦点の変動の仕方が違うことから(たぶん…)ほとんど画像の精度を向上することができませんでした。補正アルゴリズム②では台座の変動も含めた機器全体の変動を検出するために台座の上に目印を置き、ブレを補正することを考えます。
予備実験
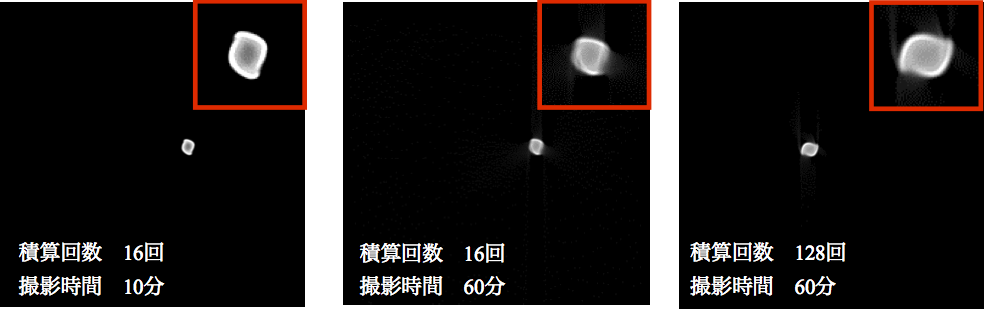
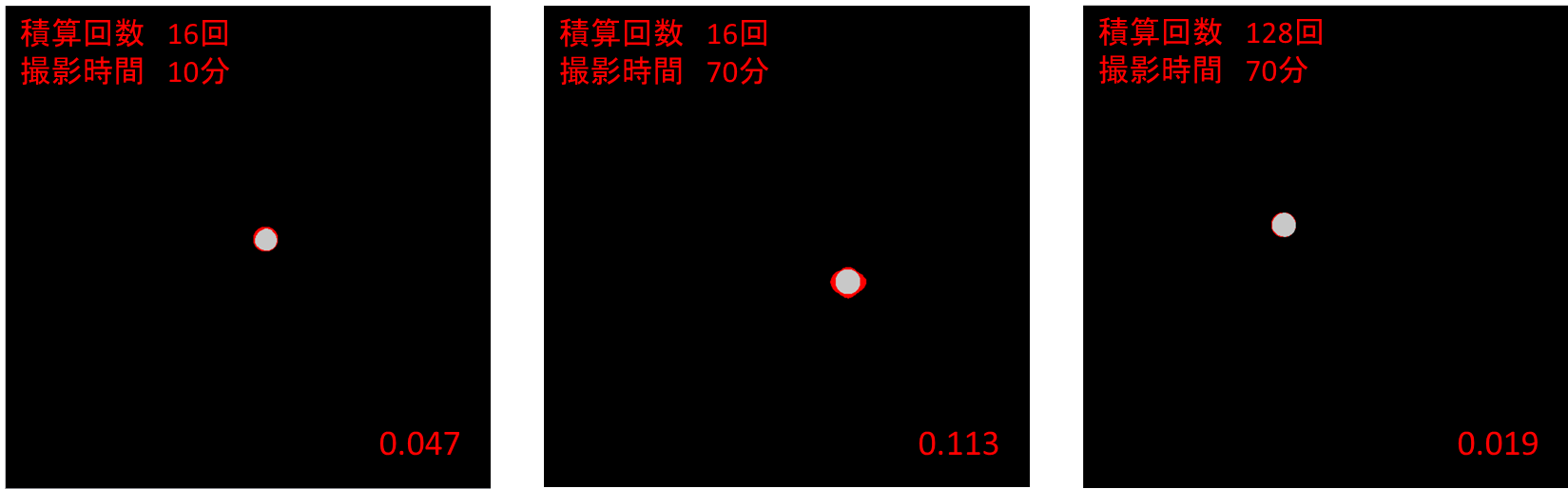
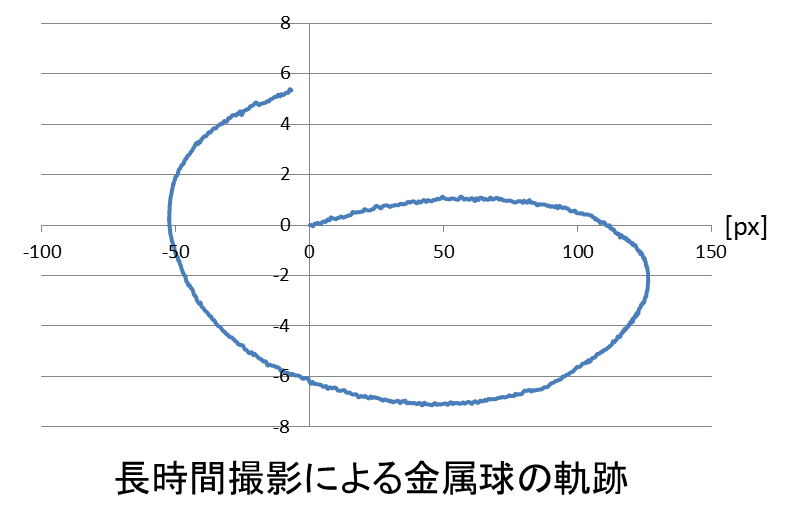
予備実験としてボールベアリングのボールを被写体として通常撮影(約10分程度の撮影)と長時間撮影(約70分の撮影)を行いその軌跡を調べました。積算回数はどちらも16回となっています。

結果を比較すると通常撮影を行った場合、最終的に元の場所に目印が戻ってきたのを確認できたのに対して、長時間撮影を行った場合は軌道が大きくずれていることが分かりました。これが長時間撮影による画質低下の原因になっているブレであると考えることができると思います。
理想的な軌道を求める
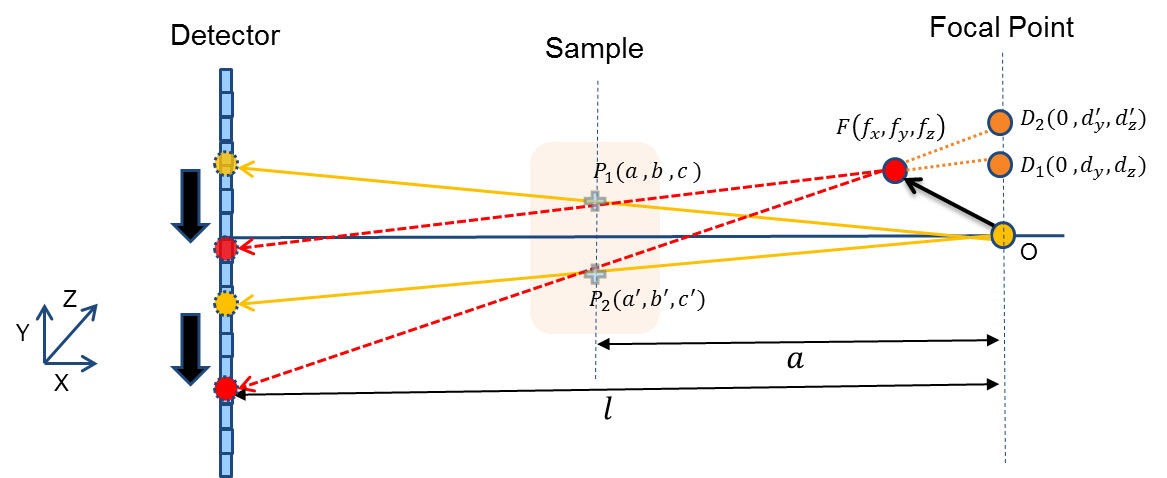
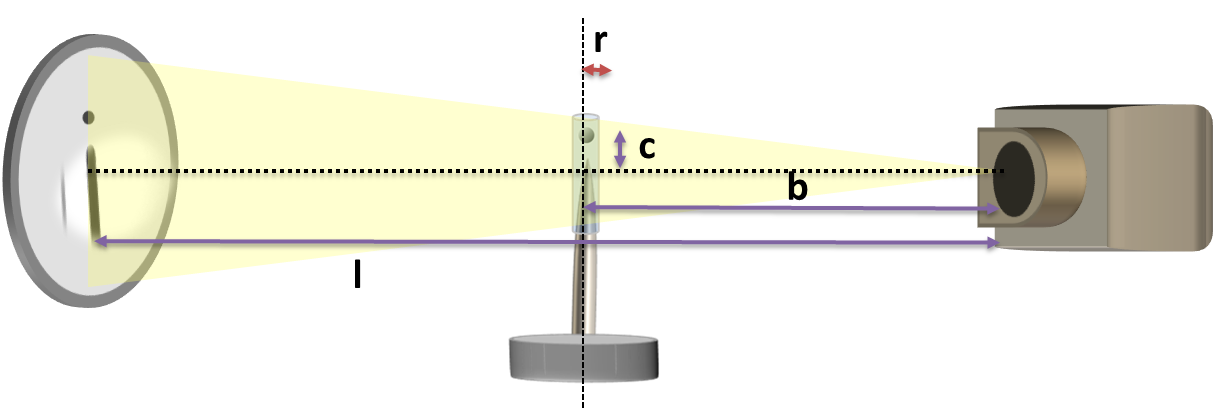
幾何学的な計算を行うことで、球体の理想的な軌跡を求めることができるので、その算出を試みました。目印(金属球)の回転中心までの距離rは実際の軌跡のデータから算出して、0.96mmとしています。回転角θが0の時のPの座標を算出すると(-0.96, 1.37, -0.04)となりました。この座標をθ度ずつ回転させた座標をそれぞれ投影していきます。
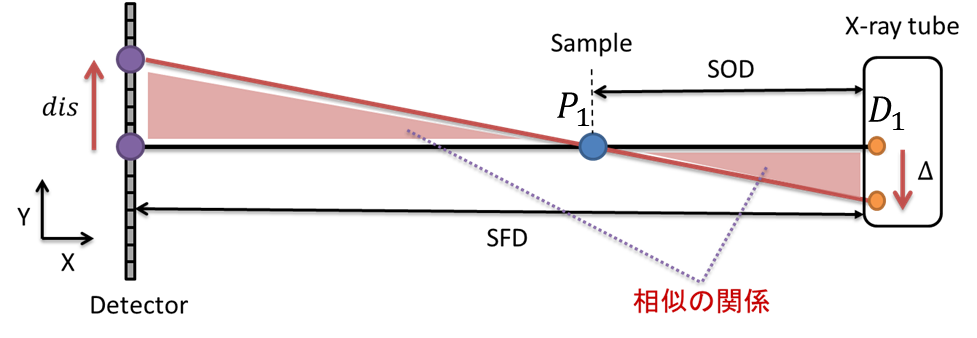
 ①被写体である金属球を通り、焦点と検出器をつなぐ直線の方程式を求める。
①被写体である金属球を通り、焦点と検出器をつなぐ直線の方程式を求める。
$$\frac{x-y_1}{x_1-b}=\frac{y-y_1}{y_1}=\frac{z-z_1}{z_1}$$
②投影面と交わる点の座標を代入して整理して、投影面の座標を求める。
$$y”_1=y_1(1+\frac{l}{a-x_1})$$
$$z”_1=z_1(1+\frac{l}{a-x_1})$$
③点Pの最初の座標は()でこの座標をY軸を固定してθ度ずつ回転させていきます。そうするとその座標は・・・
$$(x_1,y_2,z_1)=(x_1,y_1,z_1)\left(\begin{array}{ccc}cos\theta\;\;\;0-sin\theta\\0\;\;\;\;\;1\;\;\;\;\;0\\sin\theta\;\;\;0\;\;\;cos\theta\end{array} \right)$$
$$=(x_1cos\theta-z_1sin\theta, y_1, x_1sin\theta+z_1cos\theta)$$
④検出器に投影される座標は
$$(a,y_1(1+\frac{l}{a-x_1}),z_1(1+\frac{l}{a-x_1}))$$
⑤上の式に回転後の座標を代入すると・・・
$$(a,y_1(1+\frac{l}{b-x_1cos\theta+z_1sin\theta}),(x_1sin\theta+z_1cos\theta)(1+\frac{l}{b-x_1cos\theta+z_1sin\theta}))$$
この式が回転後の座標になります。台座上では回転中心からの距離はrで、高さは透視画像から算出しました。rについてはとりあえず1㎜として計算してみました。その結果を示します。

今回求めた結果楕円状の軌跡を算出することができました。rは適当ですが結構実験値と近い結果になりました。ですが、金属球は遠くなったり近くなったりするわけで、ここまできれいになることは考えにくいと思います。ですので計算方法をもう一度考え直してみたいと思います。
実験
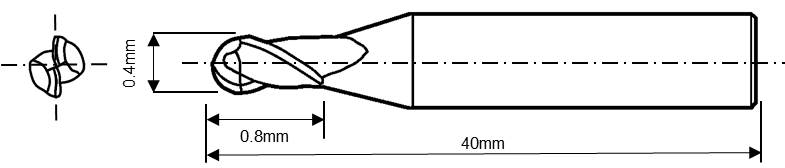
被写体には補正アルゴリズム①で使用したものと同じ直径0.4mmのドリルの刃を使用します。目印にはボールペンのボール(直径0.5mm)を使用します。ボールペンのボールは大変苦労しましたが、ラジオペンチと万力を使用してペン先を押しつぶして取り出しました。当初はキャップを作って被写体と目印を同時撮影するつもりでしたが、時間もないので消しゴムの中にボールを埋め込んでドリルに突き刺して被写体を作りました。
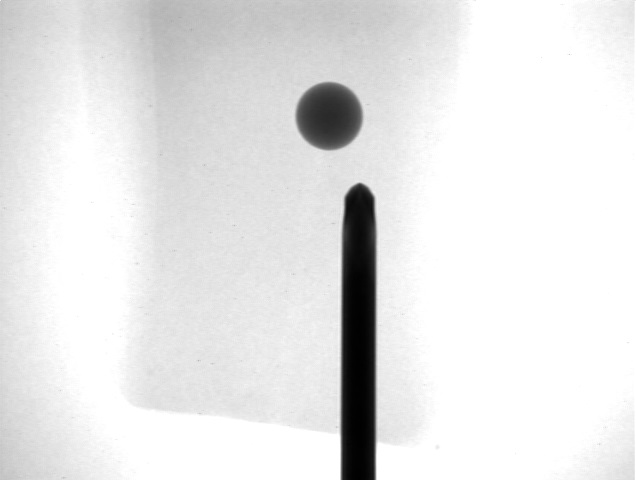
透視撮影を行うと以下のような透視画像が得られます。この透視画像800方向分のデータを使って、ボールの軌跡を調べドリルの刃の撮影中に生じたボケを補正していきたいと思います。
金属球の重心の変動を調べてみると下図のような結果になりました。始点と終点で金属球の位置が大きく異なっていることがわかりました。これだけ変動していれば画像のボケも大きくなりそうです。
サイノグラムを作成すると以下のようになります。消しゴムの領域が灰色になって表示されています。ファンパラ変換をすると長時間撮影の影響でサイノグラムが上と下でつながっていないのがわかります。ファンパラ変換とはパラレルビームで撮影を行っていると考えて作っていたサイノグラムのデータをファンビームでとったものに変換することだと思います。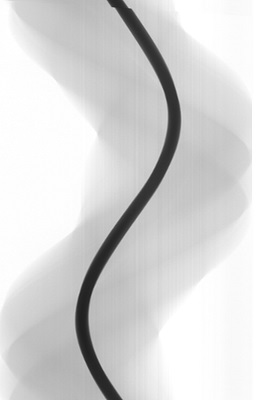
この画像を使ってフィルタ補正逆投影法で画像の再構成を行うと以下のようになります。拡大率22倍での撮影ではアーチファクトは出ていますが、画像のボケはあまりはっきり見えませんでした。もう少しぶれている気がしましたが…とりあえずこれらの画像データを使用することにします。
ブレの補正
X線点光源ブレのを含む、X線CT装置全体の撮影中に生じる歪みによる画像のボケを補正する為に、まずはサイノグラムをブレの大きさに応じてY方向、Z方向に線形に移動させてみました。実験結果より最終的なブレはY方向に5.3px、Z方向に6.1pxです。X線点光源のブレの測定実験でも台座の上にのせた被写体は、ほぼ線形に移動していることがわかっているので、Y方向、Z方向にサイノグラムを動かした結果下図右側のようなサイノグラムと再構成画像を得ることができました。
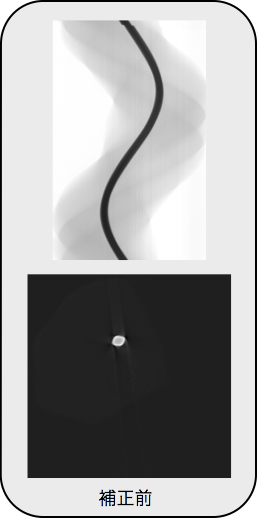
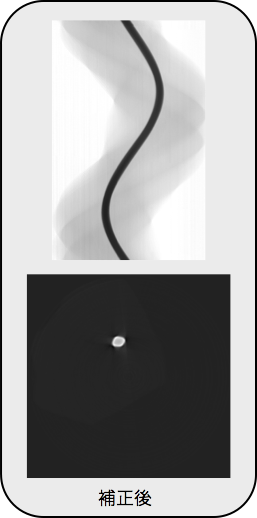
補正前と補正後で比較すると、補正前ではサイノグラムは始めと終わりでつながっていませんでしたが、処理を行うことでつながりました。再構成画像を見ても、若干画像がぼけたようにも見えますが、ドリルの刃から出ていたアーチファクトが少なくなったことを確認することができました。画像評価の一つの使用と考えている抽出できたサイノグラムの本数は、478本から486本と微増しました。
課題
抽出できたサイノグラムの本数だけでは画像を評価することは困難なので、画像を評価する方法を何か考えたい。MSE(Mean Square Error)やPSNR(Peak Signal to Noise Ratio)など?
また、金属球の理想的な軌道を求めるためには、金属球の座標を正確に(0.1ミリスケールくらい)知る必要があり、座標をできる限り正確に調べる必要がありそうです。それと金属球の軌跡は投影すると楕円にはならなそうなので計算方法も考え直す必要がありそうです。