2次元的な焦点の移動
検出器に検出される目印の位置から、図のように相似の関係を使って焦点の変動を調べることができます。本研究で使用しているCTの仕様では検出器上の1ピクセルは0.2353mmに相当し、SFD(焦点から検出器までの距離)は463mmとなっています。
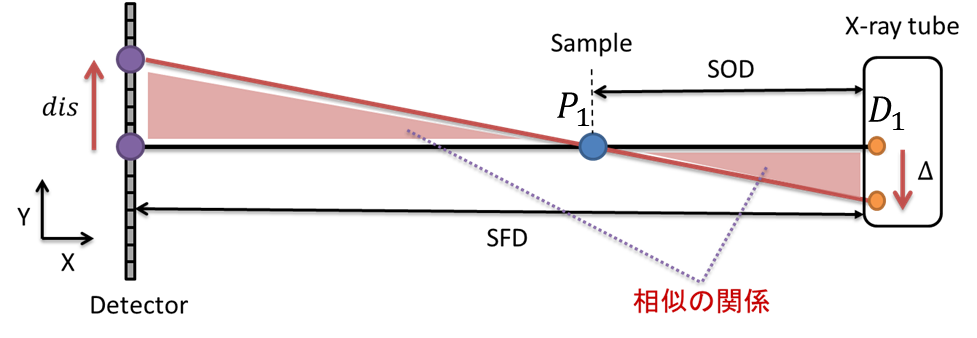
まずはピクセルをmmに変換してみます。検出器上の変位をdis[px]として、検出器上で0.6pixel移動した場合を考えます。
$$d = dis \times 0.2353 \times \frac{SOD}{SFD}$$
この式よりmmに変換ができます。変動が0.6px、SOD(被写体から焦点までの距離)が15mmだった場合、計算すると0.14㎜検出器上で変動していたことがわかります。ちなみにSFDをSODで割ることで拡大率を求めることができます。
次に相似の関係から焦点の変動を求めます。以下の式で求めることができいます。
$$\Delta=\frac{d \times SOD}{SFD – SOD}$$
計算すると焦点の変動は0.0047mmであったことがわかります。この変換式を使うことで、2次元的な焦点の変動を求めることができます。

3次元的な焦点移動
これまでに2次元的な焦点の移動を調べましたが、図のように被写体の2つの点(P1,P2)を使って3次元的な変動も調べることができると思います。
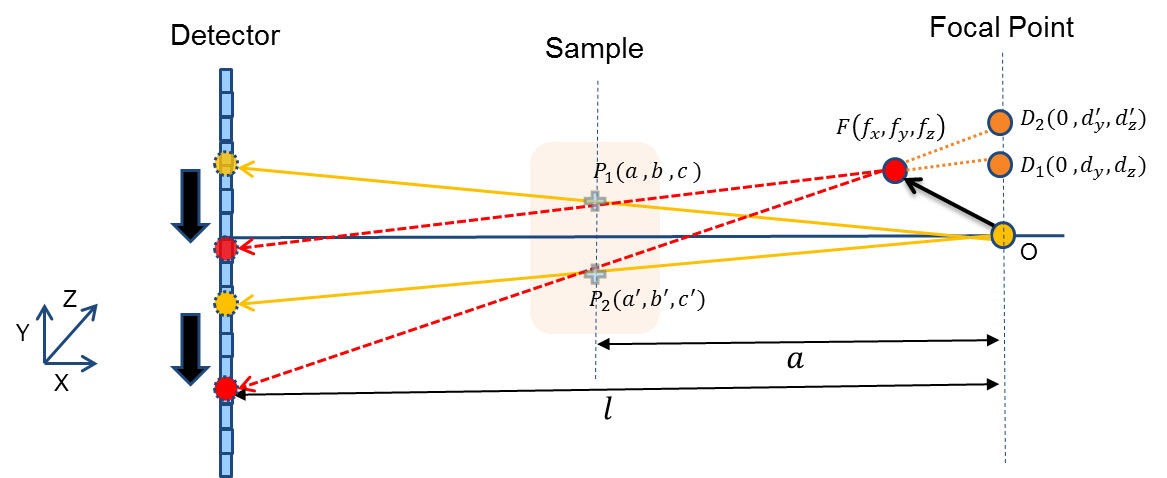
焦点の初期位置を原点として、2次元的に焦点が移動した点D1,D2と被写体のP1,P2を通る直線の方程式を求めます。
$$\frac{x-a}{-a}=\frac{y-b}{d_y-b}=\frac{z-c}{d_z-c}$$ ・・・①
$$\frac{x-a”}{-a”}=\frac{y-b”}{d”_y-b”}=\frac{z-c”}{d”_z-c”}$$ ・・・②
3次元的な焦点の位置は①、②式の交点であると考えられるので、①、②式を媒介変数s,tを使って解きます。媒介変数を使って式を変換することで以下の6つの式を求めることができます。
$$x = -as +a$$ ・・・③
$$y = (d_y – b)s + b$$ ・・・④
$$z = (d_z – c)s + c$$ ・・・⑤
$$x = -a”s +a”$$ ・・・⑥
$$y = (d”_y – b”)s + b”$$ ・・・⑦
$$z = (d”_z – c”)s + c”$$ ・・・⑧
③~⑧の6つの式を同時に満たすs,tを求めます。とりあえずtの値を求めてみると…
$$t = \frac{a”d_y – ad_y – a”b + ab”}{-ad”_y + a”b + a”d_y -ab}$$
求めたtを⑥⑦⑧式に代入すると三次元的な焦点の座標を求めることができます。
$$(x,y,z) = (-a”t+a”,(d”_y-b”)t+b”,(d”_z-c”)t+c”)$$
導出した式を使って、3次元的な焦点の変動を算出してみると図のような変動をしていることがわかりました。

本研究で使用している焦点の大きさは5μmであることから、焦点の変動自体は非常に小さいことがわかりました。奥行き方向(X方向)のぶれもほとんどありませんでした。このことから画像のボケの原因は、やはり焦点の変動以外の要因が大きいことが考えられます。